Az itt látható rendszer a repülőgépeken elhelyezett
transzponderek (speciális rádió adó-vevők) által sugárzott
jelcsomagok vételével becsli meg a repülőgép aktuális
pozícióját.
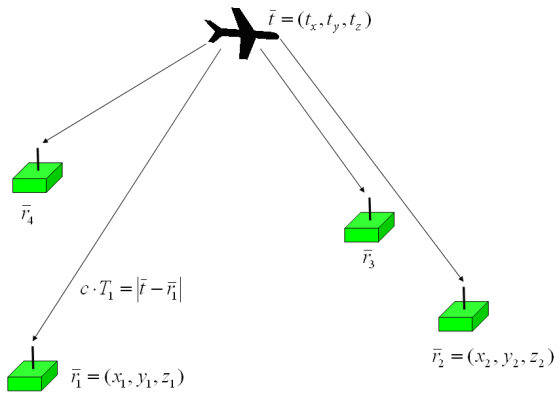
A rendszer működéséhez sok, egymástól messzire elhelyezett
rádióvevőre van szükség. A multilaterációs algoritmus
végrahajtásához szükséges paraméterek az egyes vételi
állomások koordinátái, valamint a jelcsomagok egyes
állomásoknál mért vételi időpontja.
A multilaterációs pozíciómérés időmérésen alapuló módszer, ezért pontossága elsősorban az egyes vételi állomások óráinak pontosságától függ. A WAMLAT rendszer GPS alapú lokális órákat használ az egyes állomásokon, melyek pontossága jobb, mint a másodperc tíz milliomod része.
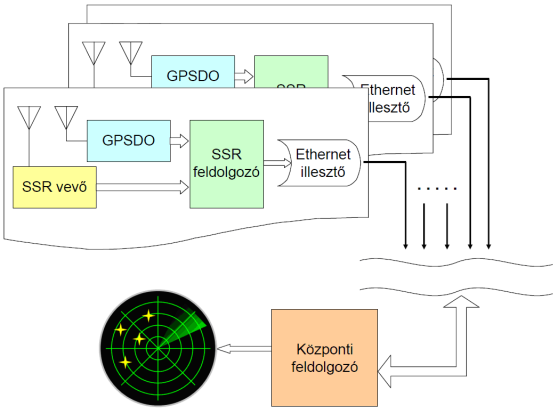
A WAMLAT rendszer sok passzív vevőből és egy központi
feldolgozóból áll. Az egyes vevőállomások tartalmazzák a
speciális rádióvevő modulokat, valamint a GPS alapú,
nagypontosságú órákat.
A mérési eredmények az Interneten keresztül jutnak el a
központi feldolgozóra, mely az ezen honlapon látható
eredmények kiszámítását és megjelenítését végzi el.
Mutilateráción alapuló pozíciómeghatározás
Budapest területét lefedő passzív radarrendszer